Ⅰ. Introduction of filter
Ⅱ. Working principle of filter
Ⅲ. Types of filters
Ⅳ. Common application fields of filters
Ⅴ.Frequency Response of Filter
Ⅵ.How many types of filters are used for filtration?
Ⅶ.How many different filters are there?
Ⅷ.What are digital filters used for?
Ⅸ.What are filters and how do they work?
X.What are the main types of digital filters?
Ⅰ. Introduction of filter
A filter is a signal processing device or system used to alter the frequency characteristics of a signal. It can selectively enhance or suppress specific frequency components in the signal, thereby realizing the frequency domain processing of the signal.
A filter is a filter circuit composed of capacitors, inductors and resistors. The filter can effectively filter the frequency point of a specific frequency in the power line or frequencies other than this frequency point to obtain a power signal of a specific frequency or eliminate a power signal of a specific frequency.
A filter is a circuit or an arithmetic processing system with a frequency selection function, and has the function of filtering out noise and separating various signals.
In signal processing, a filter is a device or process that removes some unwanted components or features from a signal. Filters are a class of signal processing in which the defining characteristic of a filter is the complete or partial suppression of certain aspects of a signal. Filters are widely used in electronics and telecommunications, in radio, television, recording, radar, control systems, music synthesis, image processing, and computer graphics. Filters are classified on many different grounds, which overlap in many different ways; there is no simple hierarchical classification. Filters may be nonlinear or linear time-varying or time-invariant, also known as shift-invariant.
Analog or digital discrete-time (sampling) or continuous-time continuous-time filters of passive or active type discrete-time or digital filters of infinite impulse response (IIR) or finite impulse response (FIR) type. Linear continuous-time filter Linear continuous-time circuit is probably the most common meaning of filter in the signal processing field, and simple filter is often considered synonymous. These circuits are generally designed to reject certain frequencies while allowing others to pass. Circuits that perform this function typically respond linearly, or at least approximately. Any non-linearity can cause the output signal to contain frequency content not present in the input signal. A modern approach to the design of linear continuous-time filters is called network synthesis. Some important families of filters designed in this way are .
The filter is one of the essential key components in the radio frequency system. It is mainly used for frequency selection, allowing the required frequency signal to pass and reflecting the unwanted interference frequency signal. Filters are widely used in the RF, IF and baseband sections of receivers. Although for the development of this digital technology, the digital filter has replaced the analog filter of the baseband part and even the intermediate frequency part, but the filter of the radio frequency part is still irreplaceable. Therefore, the filter is one of the essential key components in the radio frequency system.
Ⅱ. Working principle of filter
1. Input signal: First, the filter will receive an input signal. This input signal may be analog (continuous time) or digital (discrete time).
2. Frequency response function: The core of the filter is its frequency response function, also known as the transfer function or the characteristics of the filter. The frequency response function describes how well a filter responds to different frequency components.
3. Frequency selection: Filters achieve different types of frequency selection by adjusting their frequency response. For example, a low-pass filter allows frequency components below the cutoff frequency to pass, and a high-pass filter allows frequency components above the cutoff frequency to pass.
4. Filter processing: The filter performs convolution or other mathematical operations on the input signal and its frequency response function to achieve frequency selective processing. In analog filters, this is usually done with electronic components such as capacitors, inductors, and operational amplifiers; in digital filters, this is done with digital signal processing algorithms.
5. Output signal: After filtering, the filter generates an output signal.
Ⅲ. Types of filters
1. According to the processing signal form
Digital filter: It is a filter that realizes filtering function through digital signal processing technology. Unlike analog filters, digital filters operate on discrete-time signals and are typically implemented in a computer or digital signal processor (DSP).
Digital filters are divided into FIR filters and IIR filters.
FIR filter: Its transfer function is a polynomial, so its frequency response can be obtained by directly calculating this polynomial. The main feature of the FIR filter is that its impulse response is finite, that is, there are only a limited number of sampling points in the time domain. FIR filters typically have a linear phase response, which means that the phase delay of the filter to each frequency component of the signal is equal.
IIR filter: Its transfer function contains a recursive part, which makes the design of IIR filter more complicated than that of FIR filter. The characteristic of the IIR filter is that its impulse response is infinitely long in the time domain, although finite length can be achieved by truncation or recursion in practical applications. IIR filters may have a nonlinear phase response, which means that the filter may introduce different phase delays for signal components at different frequencies.
Analog filter: It is a filter based on an analog circuit to realize the filtering function. It refers to filters that use analog electronic components (such as capacitors, inductors, operational amplifiers, etc.) to process continuous-time signals. Analog filters can adjust the frequency characteristics of the input signal to the desired output form for signal processing or removal of unwanted frequency components.
2. According to the circuit composition
LC passive filter: It is a passive filter based on inductance (L) and capacitance (C) components. Passive filter means that the filter does not need to use amplifiers or energy amplifiers, it only relies on passive components (such as inductors and capacitors) to achieve the filtering function. LC passive filter has the characteristics of not requiring external power supply. However, there is a disadvantage that the performance of the filter may become unstable as the frequency increases.
RC passive filter: It is a passive filter based on resistor (R) and capacitor (C) components. It is the simplest type of filter and belongs to the first-order filter.
Passive filter: refers to a filter that does not need to use an energy amplifier or amplifying circuit when realizing the filtering function, and only relies on passive components (such as resistors, capacitors, and inductors) to realize the filter. Frequency-selective processing of signals is achieved by their inherent properties. Passive filters are also divided into high-pass filters and low-pass filters.
High Pass Filter: Allows signals above the cutoff frequency to pass and rejects signals below the cutoff frequency. High-pass filters can be used to remove low-frequency noise, selectively amplify high-frequency signals, or smooth signals whose frequency response is biased toward the high-frequency end. A high pass filter is usually composed of capacitors and resistors and forms an RC parallel network. In the case of low frequency, the capacitor presents high impedance to the signal, so that the signal has a small energy loss on the capacitor, so that the low frequency component is blocked and the filtering effect is realized. A high-pass filter has little phase change for high-frequency signals and usually has a linear phase response.
Low Pass Filter: Allows signals below the cutoff frequency to pass and rejects signals above the cutoff frequency. Low-pass filters can be used to remove high-frequency noise, selectively amplify low-frequency signals, or smooth signals whose frequency response is skewed towards the low-frequency end. Low-pass filters are usually composed of inductors and capacitors and form an LC parallel network. Low-pass filters are usually composed of inductors and capacitors and form an LC parallel network.
RC active filter: Combines passive components (such as resistors, capacitors) and energy amplifiers (active components, such as operational amplifiers) to achieve filtering functions.
3. According to the order of the transfer function differential equation
First-order filter: refers to a filter whose order is 1. The order refers to the ability of the filter to achieve frequency selectivity, and the first-order filter means that the filter has only one-stage filtering ability. First-order filters are divided into first-order band-stop filters, first-order low-pass filters, first-order high-pass filters, and first-order band-pass filters.
Second-order filter: refers to a filter with an order of 2, which can achieve more complex frequency response and steeper filtering characteristics. Second-order filters are divided into second-order bandpass filters, second-order band-stop filters, second-order low-pass filters, and second-order high-pass filters.
High-order filter: refers to a filter with an order greater than 2, which has stronger frequency selectivity and filtering capabilities. Higher order filters allow for more complex frequency responses, steeper filter characteristics and more precise frequency selection. High-order filters can be divided into types of different orders, such as third-order filters, fourth-order filters, and fifth-order filters. Generally, the higher the order of a high-order filter, the steeper its filtering characteristics. For band-pass and band-stop filters, there is a smaller transition bandwidth near the cutoff frequency. It is often used in some occasions that require high filtering effects, such as audio processing, communication systems, radio modulation and demodulation, radar signal processing, etc. The design of high-order filters is relatively complicated, and more circuit parameters and frequency response requirements usually need to be considered. Common high-order filters include high-order elliptic filters, high-order Butterworth filters, and high-order Chebyshev filters.
High-order elliptic filter: can achieve a relatively steep frequency response in the passband, transition band and stopband. Higher order elliptic filters can achieve a steeper frequency response than other filter types. This means that within the transition band, frequency changes are quickly suppressed or amplified by the filter, resulting in more precise filtering. Higher-order elliptic filters can achieve higher flatness in the passband and stopband, so the signal gain in the passband and signal attenuation in the stopband can be more accurately maintained.
High-order Butterworth filter: It is a common type of high-order filter with a flat frequency response characteristic. It is a ripple-free filter and is suitable for applications that require a balanced frequency response. The amplitude-frequency characteristic of a high-order Butterworth filter is ripple-free, which means it introduces no additional frequency components in the passband or stopband. The maximum flatness of the amplitude-frequency characteristic in the passband range of the high-order Butterworth filter can be achieved, and thus the maximum signal transfer efficiency can be achieved.
Higher-order Chebyshev filters: Higher-order Chebyshev filters are characterized by a steeper frequency response in the transition band and have less ripple in the transition band than higher-order Butterworth filters. A higher order Chebyshev filter can achieve a steeper frequency response than a higher order Butterworth filter. This means that within the transition band, frequency changes are quickly suppressed or amplified by the filter, resulting in faster filtering.
4. Alpha-Beta filter
The alpha-beta filter is a simplified form of the observer for estimation, data smoothing, and control applications. It is closely related to Kalman filters and linear state observers used in control theory. Its main advantage is that it does not require a detailed system model. An alpha-beta filter is actually a composite filter that combines two parts: an alpha filter and a beta filter. These two parts each have different characteristics, and when combined together, smooth and fast tracking of the signal can be achieved.
Alpha filter: The alpha filter is used to smooth the signal. It reduces noise and sudden changes in the signal by performing a weighted average of the current observation value and the previous filtering results. The alpha filter is mainly used to provide a smooth output of the signal, which is suitable for applications that require high stability.
Beta filter: The beta filter is used to quickly track the change of the signal. It predicts the change of the signal based on the current observation value and the previous estimated value, so as to realize the fast tracking of the signal. The beta filter is mainly used for fast response to the dynamic changes of the signal, and is suitable for applications with high real-time requirements.

5. Digital filter
Digital filters correspond to analog filters, and we use digital filters in commonly used discrete systems. Its main function is to use the characteristics of the discrete time system, where time is a variable, and then process the external input signal. The input signal here is generally a waveform model in a broad sense. The signal can be voltage, current, power etc. Of course, there are similar frequency and so on.
There are many ways for digital filters to realize signal processing. We introduce the two most used in practice. One is that our integrated circuit method combines various components of the integrated circuit into a dedicated device. This device is called It is a digital signal processor.
There are two main types of digital filters, one is IIR, which we call an infinite impulse response filter, and the other is FIR, which corresponds to IIR, and this is a finite impulse response filter device. Both systems have their own characteristics. The FIR filter is a loop signal without closed-loop feedback. Its structure is relatively simple, and it can realize the calculation of the phase of a relatively strict linear equation. Generally, the phase requirement is not high. Strictly generally, this filter will not be used. On the contrary, this filter will be used. FIR filters actually have certain defects. This type of system only has zero points. It will not be as easy to obtain better attenuation characteristics as IIR systems, but it also has more obvious advantages. It is realized by non-hardware circuits. Compared with hardware circuits, there are many main advantages of filters, such as high efficiency, poles, and feedback.
6. Programmable filter system
The program-controlled filtering system is a filtering system that realizes the filtering function through a computer or a digital signal processor (DSP). It uses computer control and digital signal processing technology to load the filter parameters and filtering algorithm into the computer or DSP in a programmed manner.
The program-controlled filter system is proposed based on the shortcomings of the traditional filter. The traditional filter produces errors during operation, which will affect the accuracy of the entire system. Low-precision filters will cause many adverse consequences when used, and the higher the waveform requirements of traditional filters, the more operational amplifiers are needed, which is very troublesome. Therefore, the digitalization of program-controlled filters can reduce uncertain factors and the number of links in the production process, and can effectively solve engineering problems such as reliability, intelligence, and product consistency in power modules, and greatly improve production efficiency and product quality. maintainability.
The program-controlled filtering system has high flexibility, because the parameters and algorithms of the filter can be adjusted and modified by programming without substantial changes to the hardware. In this way, adjustment and optimization under different filtering requirements can be easily realized. The program-controlled filtering system can realize various filtering algorithms and filter types. It can contain various filter design methods, such as FIR filter, IIR filter, high-pass filter, low-pass filter, band-pass filter, etc., so that it can be applied to different filtering requirements.
7. SAW filter
It is an electro-acoustic coupling filter, which uses the characteristics of surface acoustic waves to propagate on the surface of piezoelectric crystals to achieve signal filtering. SAW filter is a surface acoustic wave filter suitable for signal processing in the high frequency and ultra high frequency range, especially widely used in wireless communication, radar system and frequency selective applications.
The working principle of the SAW filter is that the input signal is applied to the surface of the piezoelectric crystal through the electrodes to stimulate the generation of surface acoustic waves. Surface acoustic waves propagate across the surface of a crystal while interacting with the crystal structure, creating a frequency-selective propagation path. On the propagation path, the velocity of the surface acoustic wave is affected by the crystal characteristics and the length of the propagation path, and signals of different frequencies are delayed in different degrees during the propagation process.
The advantages of SAW filters are excellent frequency selectivity and steep filtering characteristics, which can achieve efficient filtering of signal frequencies. The transmission path of the SAW filter is basically lossless, so it has low insertion loss.
8. RF filter
It is a type of filter specially used for radio frequency signal processing. RF filters are mainly used in high-frequency signal processing fields such as radio frequency communication systems, radar systems, and radio equipment to achieve frequency selectivity for RF signals and suppress unwanted frequency components.
RF filters need to operate in the high frequency range, typically covering the frequency range from a few hundred kilohertz (kHz) to several gigahertz (GHz). Due to the high frequency of radio frequency signals, radio frequency filters need to have high frequency characteristics and high frequency response. Applications such as RF communications and radar systems often require narrow frequency bandwidths for signal transmission or target detection. In the radio frequency system, the loss of signal transmission is very important, so the radio frequency filter needs to reduce the insertion loss as much as possible to ensure the transmission efficiency of the radio frequency signal. RF filters need to maintain stable performance in different working environments without being affected by factors such as temperature and humidity.
Ⅳ. Common application fields of filters
1. Image processing: In image processing, filters are often used in image denoising, edge detection, image enhancement, etc. For example, noise reduction filters in digital cameras, blur filters in image processing software, etc.
2. Audio communication: In audio communication, filters are used for codec, compression and band limitation of audio signals. For example, filters in codecs in VoIP communications, etc.
3. Communication system: In a communication system, filters are used to filter out signals in different frequency ranges to achieve signal frequency selectivity and remove interference. For example, frequency selection circuits in radios, demodulation filters in communication systems, etc.
4. Radar signal processing: In radar signal processing, filters are used to filter and demodulate radar signals to extract target information. For example, matched filters in radar systems, Kalman filters in moving target detection, etc.
5. Audio processing: In audio processing, filters are used for equalization, noise reduction and tone adjustment of audio signals. For example, equalizers in audio equipment, noise reduction filters in noise-canceling headphones, etc.
6. Biomedicine: In the medical field, filters are used to filter and analyze biological signals, such as electrocardiogram filtering and electroencephalogram filtering.
7. Control system: In the control system, the filter is used to remove the noise in the sensor data and improve the stability and accuracy of the control system. For example, filters in robot control systems, filters in flight control systems, etc.

Ⅴ.Frequency Response of Filter
The frequency response of a filter refers to the response of the filter to input signals of different frequency components. It is one of the core characteristics of the filter, which describes the gain or attenuation of the signal by the filter at different frequencies.
For digital filters, the frequency response can be expressed by a discrete frequency response function or a difference equation. The discrete frequency response function describes the response of the digital filter to different discrete frequency components, and the difference equation is the equation that describes the operation of the digital filter.
For analog filters, the frequency response is usually given in terms of a transfer function, which is a complex relationship between the input signal and the output signal. The transfer function is a function between the input frequency and the output frequency, and describes the characteristics of the filter by transforming the frequency in the frequency domain to the frequency in the complex plane.
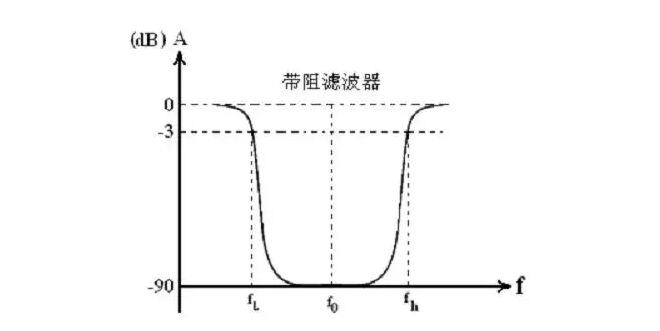
The frequency response of the filter directly affects the processing effect of the filter on the signal. Different types of filters have different frequency response characteristics. For example, low-pass filters attenuate high-frequency components, high-pass filters attenuate low-frequency components, band-pass filters allow frequency components to pass within a certain range, and band-stop filters suppress Frequency components within a certain range.
Ⅵ.How many types of filters are used for filtration?
Three common filter types for particle filtration are bag, cartridge, and self-cleaning filters. Bag Filters. Bag filters are a great option for smaller applications and systems where minimizing waste is important. As the name suggests, bag filters are in the shape of an elongated bag.
Ⅶ.How many different filters are there?
Every car has four main filters: the cabin filter, oil filter, fuel filter and air filter. The function of all these filters is to enable flows and catch impurities: the dust and contaminants in the air, the impurities in the fuel or the dirt in the motor oil.
Ⅷ.What are digital filters used for?
Digital filters are used for two general purposes: (1) separation of signals that have been combined, and (2) restoration of signals that have been distorted in some way. Analog (electronic) filters can be used for these same tasks; however, digital filters can achieve far superior results.
Ⅸ.What are filters and how do they work?
Filters are systems or elements used to remove substances such as dust or dirt, or electronic signals, etc., as they pass through filtering media or devices. Filters are available for filtering air or gases, fluids, as well as electrical and optical phenomena. Air filters are used for cleaning the air.
X.What are the main types of digital filters?
There are two fundamental types of digital filters: finite impulse response (FIR) and infinite impulse response (IIR). As the terminology suggests, these classifications refer to the filter's impulse response.
标签:filters